说明:
本文首发于 CSDN,转载请保留链接。
前言
关于ROS和Arduino通信方式,刚开始大多使用的是rosserial_arduino这个库,随后又诞生了一个新的库名为ros_arduino_bridge,两者对比如下:
- rosserial_arduino:由于将Arduino内的程序写成ros节点形式,所以能够快速的通过ROS控制Arduino,并且可以忽略通信协议层,与之相同的还有rosserial_stm32f1库,但是由于将Arduino作为ROS节点,不可避免的产生通信延时较大的问题,而且运行该库是通过rosserial_python包内的serial_node.py启动,该脚本使用了tcpip协议,有点大材小用,uno速率会跟不上,导致启动过程中一崩溃很难在连接上的问题,学习ROS可以使用。
- ros_arduino_bridge:是自定义通信协议方式来与Arduino进行通信,和大多数控制形式一致,将通信协议固定可以让初学者在使用过程中了解通信协议,由于是自定义通信协议形式,可以即插即用,和rosserial_arduino有本质差别,不过在使用过程中需要自己配置,所以需要有一定的arudino编程基础,早期的EAI dashgo D1采用的就是这种形式,使用这个库可以缩短底盘开发时间,并且Arduino有很多开源包供使用,会相对轻松一些。
关于如何使用rosserial_arduino_bridge,作者在github的Readme中写的很清楚,当然,是使用英文编写,如果大家想要查看中文,这里是一个很好的方式,我做的小车就是参考这篇博客,写的很清楚。
注意事项
编码器
关于如何使用我就不在赘述了,大家可以参考上面博客进行查看,作者代码在github上也有给出。查看作者代码发现作者应该用的Arduino mega板,电机控制器是L298N模块,我使用的是Arduino Uno板作为测试,电机控制器也选用的L298N,所以更改代码如下:
将ros_arduino_bridge/ros_arduino_firmware/src/libraries/ROSArduinoBridge/encoder_driver.h的内容:
#ifdef ARDUINO_MY_COUNTER
#define LEFT_ENC_A 2
#define LEFT_ENC_B 22
#define RIGHT_ENC_A 21
#define RIGHT_ENC_B 24
void initEncoders();
void leftEncoderEvent();
void rightEncoderEvent();
#endif
修改为
#ifdef ARDUINO_MY_COUNTER
#define LEFT_ENC_A 2
#define LEFT_ENC_B 4
#define RIGHT_ENC_A 3
#define RIGHT_ENC_B 11
void initEncoders();
void leftEncoderEvent();
void rightEncoderEvent();
#endif
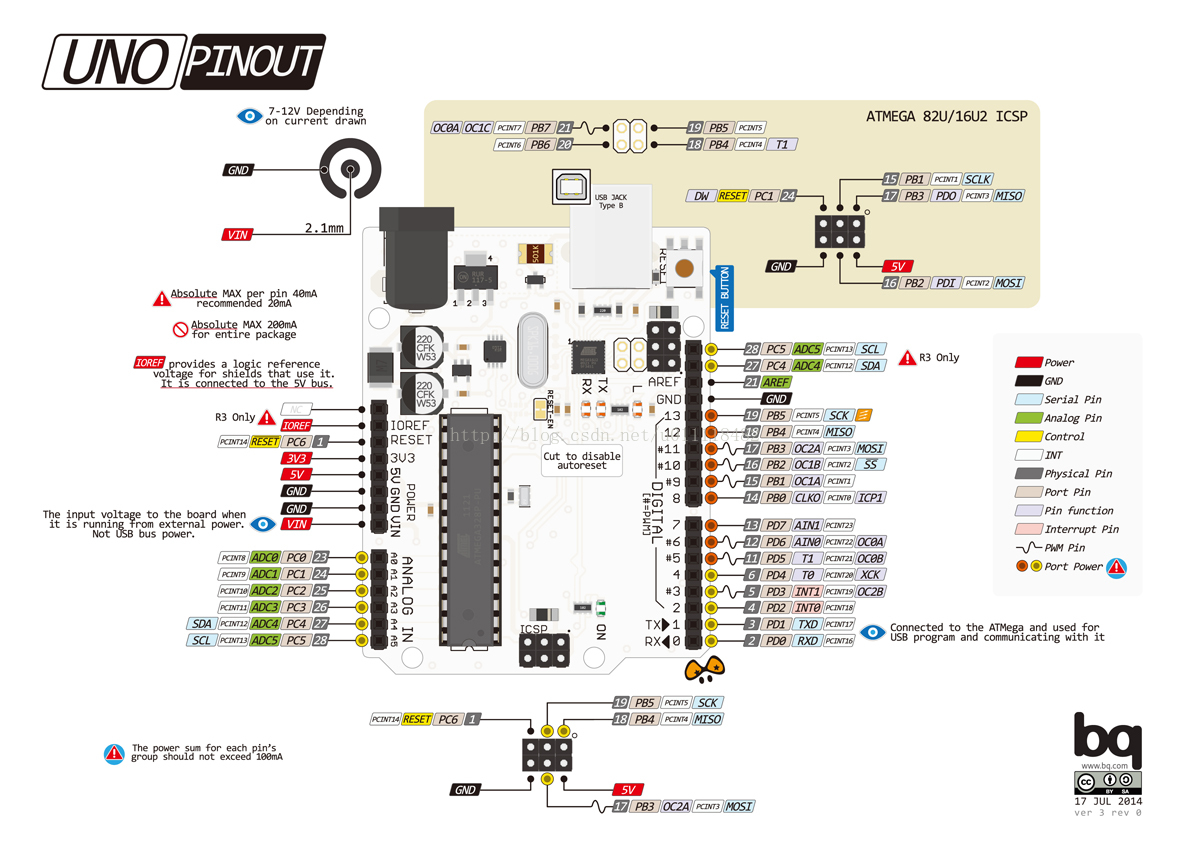
关于这点需要注意,由于Arduino Uno只有两个中断,所以只能将两个中断分开给左编码器和右编码器,即Uno两个中断对应硬件分别为2和3,其中引脚2对应中断号为0,引脚3对应中断号为1,如下图
修改完成后,还需修改ros_arduino_bridge/ros_arduino_firmware/src/libraries/ROSArduinoBridge/encoder_driver.ino
将内容
void initEncoders(){
pinMode(LEFT_ENC_A, INPUT);
pinMode(LEFT_ENC_B, INPUT);
pinMode(RIGHT_ENC_A, INPUT);
pinMode(RIGHT_ENC_B, INPUT);
attachInterrupt(0, leftEncoderEvent, CHANGE);
attachInterrupt(2, rightEncoderEvent, CHANGE);
修改为
void initEncoders(){
pinMode(LEFT_ENC_A, INPUT);
pinMode(LEFT_ENC_B, INPUT);
pinMode(RIGHT_ENC_A, INPUT);
pinMode(RIGHT_ENC_B, INPUT);
attachInterrupt(0, leftEncoderEvent, CHANGE);
attachInterrupt(1, rightEncoderEvent, CHANGE);
注意变化,mega有四个中断,而Uno只有两个,所以需要修改为中断0、中断1。不然造成的结果是有一个电机编码器无数据,一直为0。
同样的,如果引脚类型不对应也会造成错误,如右电机,我将编码器A接上引脚3,编码器B接上引脚12,造成结果是右编码器数据一直在累加,即使电机没有转动,这是由于引脚3作为中断,类型为PWN引脚,而引脚12则为数字引脚,所以需要将编码器B接上引脚11,这是由于引脚11也为PWM类型,这样就不会造成错误。